Der Beitrag stellt die Erweiterung des Standard SAE J1939 für CAN FD in Form des Data-Link-Layer vor und die damit einhergehende Einführung von Multi-Parametergruppen (Multi-PG). Danach geht der Autor, der als Product Management Engineer bei Vector Informatik tätig ist, auf den AUTOSAR Design-Workflow ein, bevor er sich den Basis-Software-Modulen von AUTOSAR für J1939 zuwendet. Es folgen Abschnitte über die Verwendung von Multi-PG in AUTOSAR und über noch fehlende AUTOSAR-Erweiterungen zur vollständigen Unterstützung von J1939. Trotzdem kommt der Autor in seinem Resümee zum Schluss, dass sich entsprechende CAN-FD-Systeme schon heute in AUTOSAR-Projekten mit geringem Aufwand realisieren lassen. (jr)
News
Vector stellt Knowhow-Chart zur Software Factory vor
Mit dem neuen Knowhow Chart bietet Vector Infoermatik eine kompakte Übersicht über bewährte Tools, Best Practices und zielgruppenspezifische Workflow-Muster zur Umsetzung skalierbarer DevOps-Prozesse.
News
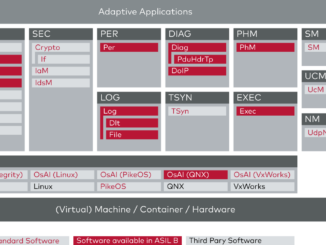
Vektor: Sichere ASIL B AUTOSAR-Adaptive-Software
Die AUTOSAR-Laufzeitumgebung von Vector für sicherheitsrelevante Mikroprozessorumgebungen ist jetzt in ASIL B Qualität verfügbar. Die Software erleichtert das Umsetzen von Fail-Safe-Systemen auf POSIX-Betriebssystemen.

Branchen-News
Lauterbach: Neue Debug- und Trace-Lösungen auf der embedded world 2026
Im Fokus stehen durchgängige Entwicklungsabläufe von virtuellen Targets bis zur realen Hardware sowie Lösungen für softwaredefinierte Fahrzeuge, funktionale Sicherheit und heterogene Multicore-Systeme.